File Structure#
the file structure for the robot code:
here is the file structure for the robot code:
Here is the flow:
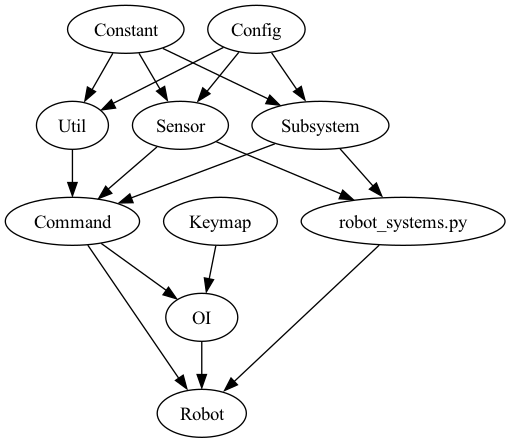
…yeah, that’s a lot of stuff. Let’s break it down.
Core Folders#
Subsystems#
The subsystem folder contains all of the subsystem mechanisms for the robot. this includes the drivetrain, elevator, intake, etc.
Subsystem classes contain methods for controlling the subsystem, and are called by commands.
This class will initialize in the robot_systems.py file under the Robot class. This will allow the subsystems to be called by commands.
Note
For example, a subsystem for the elevator could have the following methods:
move_to_height(height)- moves the elevator to a certain heightmove_to_speed(speed)- moves the elevator at a certain speedstop()- stops the elevatorget_height()- returns the height of the elevatorzero_elevator()- zeros the elevator encoder by sending the elevator to the bottom and resetting the encoder.get_encoder()- returns the encoder value of the elevator
These classes should be as simple as possible, and should not contain any logic. All logic should be contained in commands.
Its also important to add in comments for each method, so that the code is easy to understand.
Important
Most subsystems will contain the init() method. This method is called when the robot is initialized and recieving connection from devices
under the CAN network. This method should be used to initialize encoders, motors, etc.
This will be called in the RobotInit() method in robot.py using the robot_systems.py file.
If you don’t initialize your motors in the
init()method but at the top of the class, the robot will not work, and you will get errors or connection loss.
Please please please put it in there for our sanity.
Important
All subsystems must inherit from the
Subsystemclass.Subsystems are not running any logic whatsoever. They are simply a way to organize code in a clean manner.
Sensors#
The sensor folder contains all of the sensors for the robot. This includes the gyro, encoders, etc.
Similar to the subsystems, sensor classes contain methods for getting data from the sensors, and are called by commands.
This class will initialize in the robot_systems.py file under the Sensor class. This will allow the sensors to be called by commands.
Note
For example, a sensor for a limelight camera could have the following methods:
get_distance()- returns the distance from the limelight to the targetget_angle()- returns the angle from the limelight to the targetget_target()- returns whether or not the limelight has a target
These classes should be as simple as possible, and should not contain any logic. All logic should be contained in commands.
Commands#
commands are the logic of the robot. They are called by the OI or the robot runtime, and call methods from subsystems and sensors.
There are many different ways to write a command, but the most common way is to use the initialize(), execute(), and isFinished() methods.
Note
For example, a command for moving the elevator to a certain height could have the following methods:
initialize()- initializes the commandexecute()- moves the elevator to the heightisFinished()- returns whether or not the elevator is at the heightend()- stops the elevator
These methods should use the functions from the subsystems and sensors to control the robot.
Its also important to add in comments for each method, so that the code is easy to understand.
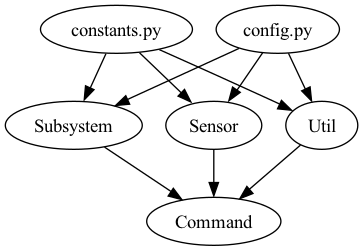
Subsystem, Sensor, Command flow#
This is the standard flow for a command. The command calls methods from the subsystems and sensors to control the robot.
Complementary Files and Folders#
utils#
The utils folder contains cross-subsystem functions that are used by both subsystems and commands.
These functions are not bound to any class, and are not called in the robot_systems.py file.
Note
For example, a function for converting inches to meters could be in the utils folder:
inches_to_meters(inches)- converts inches to meters
These functions should be as simple as possible, and should not contain any logic. All logic should be contained in commands.
constants.py#
The constants file contains all of the physical constants for the robot (IE: variables that are in correlation with physical measurements, and therefore, not likely to change).
Constants variables are used in the subsystems and sensors to control the robot.
Some examples of constants are:
DRIVETRAIN_WHEEL_DIAMETER- the diameter of the drivetrain wheelsELEVATOR_MAX_HEIGHT- the maximum height of the elevatorDRIVETRAIN_MAX_SPEED- the maximum speed of the drivetrainDRIVETRAIN_MAX_ACCELERATION- the maximum acceleration of the drivetrain
you get the idea.
config.py#
The config file contains all of the configuration variables for the robot (IE: variables that are not in correlation with physical measurements, which are more likely to change on the fly during events).
Config variables are used in the subsystems and sensors to control the robot.
Some examples of configuration variables are:
ELEVATOR_MOTOR_ID- the CAN ID of the elevator motorABSOLUTE_ENCODER_OFFSET- the offset of the absolute encoderELEVATOR_ZERO_SPEED- the speed of the elevator when zeroingELEVATOR_ACCELERATION- the acceleration of the elevator (This is not the same as the maximum acceleration of the elevator, in which case the elevator would physically break)SENSOR_DIO_PORT- the DIO port of the sensor
you get the idea.
Updated flow#
robot_systems.py#
It differs from robot.py in that it is only used to initialize the subsystems and sensors, and not to run the robot. It only runs once: when the robot is initialized. The robot_systems file contains the initialization of the subsystems, sensors, pneumatics, LEDs, and field interactions.
class Robot- creates containers for the mechanical subsystems of the robotclass Pneumatics- for managing pneumatic systemsclass Sensor- initializes sensorsclass LEDs- initializes LEDsclass PowerDistribution- manages the power distribution panelclass Field- manages field operations like odometry or autonomous trajectory calculations